Príspevok vysvetľuje jednoduchý obvod ovládača motora riadený laserom riadeným laserom, ktorý funguje tak, že reaguje na presnú horizontálnu laserovú linku vygenerovanú z lineárneho laserového vodováhy a automaticky upravuje zarovnanie pripojeného nástroja alebo práce s extrémnou dokonalosťou a presnosťou.
Čo je to čiarový laser
Lineárne laserové zariadenie je vysoko presná elektronická náhrada starodávneho zarovnávača vodováhy pre tesárov.
Čiarový laserový prístroj je vlastne pokročilé laserové emitujúce zariadenie, ktoré dokáže generovať 360 stupňov ° vysoko presná osvetlená horizontálna laserová čiara na zabezpečenie kalibračného odkazu na všetky úlohy priemyselného alebo stavebného inžinierstva, takže konečný výsledok úlohy je dokonale priamy a vyrovnaný bez najmenšej chyby.
O účasť požiadal jeden zo zasvätených čitateľov tohto blogu, pán Rafal.
Podrobné diskusie týkajúce sa pracovného postupu riadeného motora s lineárnym laserom sa dajú dozvedieť z nasledujúcich odsekov:
Cieľ návrhu
Pán. Rafal: Som v tomto veľmi nový. Za posledných pár týždňov som urobil nejaký prieskum a nenašiel som presne to, čo potrebujem.
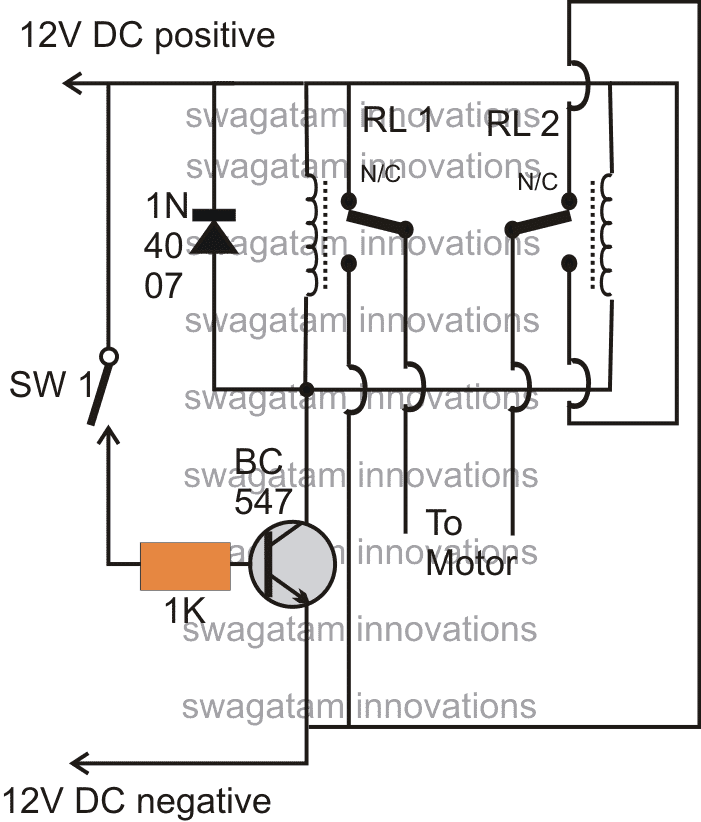
Budem vďačný za každú pomoc. Pripájam fotografiu môjho nápadu. Chcem riadiť dva 12 V DC motory laserovou hladinou.
Hladina lasera bude signalizovať prijímače.

Tento signál potom bude musieť riadiť smer 12 V jednosmerného motora. Motor otáča závitovou tyčou tam a späť, aby nastavil výšku nástroja.
Z toho, čo som objavil, by bolo paralelne zapojených niekoľko fotodiód, jedna nastavená na detekciu lasera nad nulovou úrovňou a druhá pod touto úrovňou. Nulová úroveň je iba akousi pauzou medzi fotodiódami, ktorá zabráni prebudeniu systému. Laserový senzor bez displeja. Ja som dal iba obrazovú fotografiu.
Potrebujem obvod H mosta, ale všetky mnou nájdené sa majú použiť v systéme Arduino. V prípade potreby si môžem kúpiť hotový mostík za rozumnú cenu do 30 dolárov
V ideálnom prípade by to fungovalo s červeným aj zeleným laserom, ale vlnové dĺžky sú také odlišné, že pochybujem, že by sa to dalo urobiť, a nefungovalo by to v celom svetelnom spektre.
Spočiatku by som chcel nastaviť úroveň tohto lúča pripevneného k motorom pomocou tlačidiel hore-dole. Bol by som rád, keby sa druhý motor potom pri nastavovaní vyrovnal gyroskopu, ale bez Arduina by to mohlo byť veľmi ťažké.
Cítim, že to, čo sa snažím robiť, je také jednoduché, že sa dokážem dostať preč bez použitia Arduina. A trvám na analógu, kvôli zložitým podmienkam na stavbe a zdá sa mi, že čím viac elektroniky, tým nespoľahlivé zariadenie.
Bude fungovať iba v interiéri a laserová vzdialenosť je max. 10 metrov. Motor, ktorý som našiel na začiatku, má veľkú spotrebu prúdu 200mA max 2,19 A, ale aj veľký krútiaci moment.
Napájanie 18 V ss z batérie Makita.
Vopred ďakujem za akékoľvek návrhy.
Pozdrav z Poľska
Rafal
Mať štýl : Mám zmätok v práci s motorovými hriadeľmi. Skrutka so závitom na oboch motoroch nástroj zatlačí, ale nedokáže ho vytiahnuť dozadu? Ako to funguje?
Je možné implementovať to isté pomocou jedného motora?
Pán. Rafal: Nižšie vyrovnávajúce roviny by boli možno 70 cm, iba pre malé miestnosti, napr. WC, aby ste mohli vstúpiť dverami.
Stroj bez pohonu, ručne ťahaný, iba vyrovnávacie pravítka. Vo videu sú dva žlté objekty na stožiaroch laserové detektory pevne spojené s pravítkami.
Laser stojí niekde ďalej a vytvára vodorovnú čiaru.
Motory by boli pripevnené k vozíku a závitová skrutka k vyrovnávacím priamkam pomocou laserových detektorov. Na vyrovnanie oboch strán musia byť dva motory, ale je to zrkadlový obraz.
Jedinou spoločnou časťou by bol dvojkanálový H-mostík, akoby som to robil z hotového modulu a možno aj gyroskopu, ale to je sen :).
Je dôležité, aby existovalo tlačidlo pre ľavú a pravú otáčku motora.
Postup je taký. Laser zavesím napríklad 2 m nad určenú úroveň podlahy. Zmeral som 2 metre od laserového lúča po spodný okraj pravítka.
Výšku regulujem stláčaním tlačidiel spínačov sprava-doľava tak, aby bola rovná 2 metre po spodnú hranu roviniek. Detektory som umiestnil na stožiare tak, aby bol laserový lúč medzi fotodiódovými sekciami na nulovej úrovni. A zvyšok urobí sám
Do prílohy som vložil nákres činnosti detektora.
Rafal
Dizajn obvodu

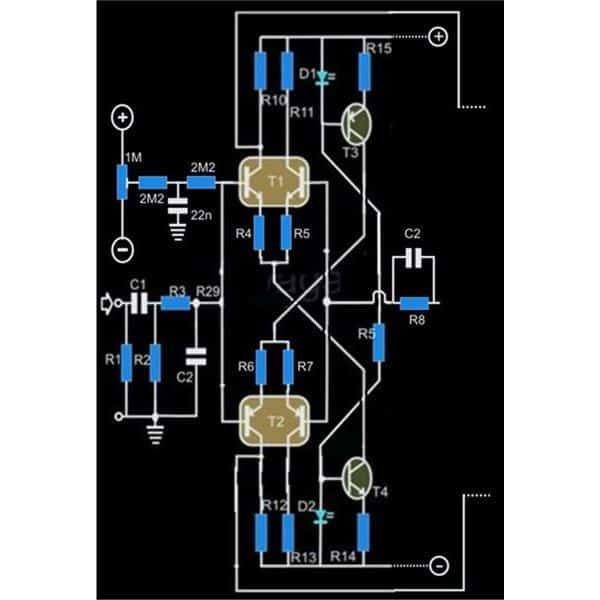
Pri pohľade na obrázok vyššie budú potrebné dva také identické stupne obvodu na detekciu a korekciu súvisiaceho motorom riadeného nástroja vzhľadom na presnosť priamky laserovej čiary.
Dve identické fázy sú navzájom zrkadlové obrazy, ako je uvedené nižšie:

Obvody sú pomerne priame. Pracuje s okenným komparátorom, ktorý zaisťuje nefunkčnosť hnacích motorov, pokiaľ je dvojica LDR vystavená rovnakému jasu laserovej čiary.
Potom sa vytvorí polovica napájacieho napätia na neinvertujúcom vstupe A1 a na invertujúcom vstupe A2.
Len čo sa zistí priehyb v laserovej línii (čo sa môže stať, ak motorom riadený nástroj nie je vyrovnaný rovno), zmení sa jas ovplyvňujúci LDR R1 a R2.
V tejto situácii sa vstupné napätie do okenného komparátora vzďaľuje od polovice napájacieho napätia. Táto situácia spôsobí, že výstup komparátora bude ovládať sieť mosta motora tak, aby pohyboval motorom v smere alebo proti smeru hodinových ručičiek.
Tranzistory T1. . . T4 sú konfigurované ako mostná sieť na umožnenie prepínania motora smeru dopredu a dozadu v závislosti od osvetlenia LDR alebo uhla odchýlky laserovej čiary.
Diódy D1. . . D4 sú umiestnené tak, aby rušili napäťové špičky generované počas doby, keď je motor avtívny a v chode. Funkcia prednastavených potenciometrov P1 a P2 slúži na uľahčenie nastavenia vyrovnania.
Tieto sú doladené tak, aby sa zabezpečilo, že motor je úplne vypnutý a neaktívny, pokiaľ je príslušný pár LDR vystavený úplne rovnakému jasu laserového svetla.
Povedzme napríklad, že v dôsledku nesprávneho vyrovnania motorom riadeného nástroja vedie sklon laserovej čiary k zníženiu svetla na LDR R2 ako na LDR R1. To spôsobí, že napätie v bode A stúpne nad polovicu napájacieho napätia.
V tejto situácii sa výstup op zosilňovača Al zvýši, čo núti tranzistory T1 a T4 pracovať. To zase spôsobí rotáciu motora v príslušnom smere. Táto akcia automaticky posúva pripojený nástroj po priamke, kým sa jeho presnosť vodorovného vyrovnania nezhoduje s presnosťou laserovej čiary.
Naopak, ak predpokladáme, že je nástroj naklonený s opačnou orientáciou, takže osvetlenie LDR je opačné ako bolo diskutované vyššie, spôsobí pokles napätia v bode A pod polovicu napájacieho napätia. Táto podmienka spúšťa výstupný operačný zosilňovač A2 na vysokú úroveň, takže T3 a T2 sú funkčné.
To vedie k tomu, že motor teraz beží v opačnom smere, v snahe opraviť vyrovnanie nástroja v príslušnom smere, až kým nebude dokonale rovný, čo sa zhoduje s horizontálnou presnosťou laserovej čiary.
Tlačidlo hore / dole
Tlačidlá hore dole na počiatočné prednastavenie výšky vodováhy možno jednoducho implementovať zapojením tlačidlových spínačov paralelne ku každému z LDR.
Inštalácia LDR
Pre získanie správnej odozvy od LDR musia byť páry ľavého a pravého inštalované vo vnútri trubice ako puzdro tak, aby boli schopné „vidieť“ iba laserové osvetlenie a nie akékoľvek iné okolité svetlo.
Túto myšlienku možno vidieť na nasledujúcom obrázku:

Tu vidíme, že LDR sú umiestnené veľmi blízko pri sebe, čo zaisťuje, že keď je laserová čiara v presnom strede, bude časť oboch párov LDR osvetlená laserovým svetlom rovnomerne.
Predná strana krytu LDR by mohla byť pokrytá rozptýlenou šošovkou, aby bolo možné rovnomerne rozptýliť laserové osvetlenie vnútri príslušných LDR.
Dvojica: Jednoduchý alarmový obvod proti krádeži na ochranu cenných predmetov Ďalej: Univerzálny testovací obvod BJT, JFET, MOSFET