V modernom svete robot bude hrať dôležitú úlohu . Hlavným účelom robota je znížiť výkon človeka. Roboty sa používajú v elektronike v mnohých aplikáciách. V tomto článku sme diskutovali o tom, ako zostaviť robota s modulom Arduino a mikrokontrolérom 8051. Pri stavbe robota s Arduinom vysvetľujeme robot Arduino s vyhýbaním sa prekážkam. Medzi požadované komponenty patrí telo robota, jednosmerný motor, ultrazvukový senzor, modul Arduino, IC ovládača motora a modul Arduino.
Ako postaviť robota?
The požadované komponenty na zostavenie robota obsahuje nasledujúce
Telo robota
Základné telo robota robot vyhýbania sa prekážkam je zobrazený na nasledujúcom obrázku. Telo robota je plastové telo a obsahuje kolesá na oboch stranách. Pred telom robota je umiestnený ultrazvukový senzor. Pomocou ultrazvukového snímača dokáže prekážka detekovať. Ak sa robot pohybuje, ak ultrazvukový snímač zistí prekážku, presunie sa nabok a bude sa pohybovať ďalej.

Telo robota
Jednosmerný motor
The DC motor je elektrický motor a beží na jednosmerný prúd. Prevádzka ktoréhokoľvek elektromotora je založená na elektromagnetizme. Magnetické pole je vytvárané vodičom prenášajúcim prúd, keď je umiestnené v externom magnetickom poli, zažije silu úmernú prúdu vo vodiči. Všeobecne vieme, že magnety majú opačnú polaritu príťažlivosti zo severu na juh a ak polarity sú rovnaké ako sever na sever a na juh na juh, potom budú magnety odpudzovať.

Jednosmerný motor
Vnútorná konfigurácia jednosmerného motora je navrhnutá na pripojenie magnetickej interakcie medzi vodičom prenášajúcim prúd a vonkajším magnetickým poľom na vytvorenie pohybu. V tomto používame dva jednosmerné motory, každý motor obsahuje 6v a celkovo dva jednosmerné motory obsahujú 12v. Dva jednosmerné motory sú umiestnené v tele robota, čo môžeme pozorovať na nasledujúcom obrázku. Telo robota sa pohybuje pomocou jednosmerných motorov

Telo robota s jednosmerným motorom
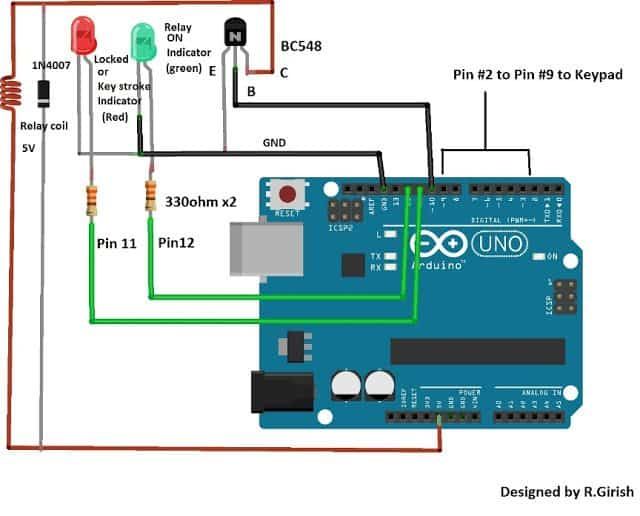
Arduino modul
Nasledujúci obrázok zobrazuje obrázok modulu arduino. The modul Arduino hrá dôležitú úlohu pri navrhovaní robota na vyhýbanie sa prekážkam pomocou súpravy arduino. Kolík prijímača arduino je pripojený k druhému kolíku ultrazvukového snímača a 1., 2. a 3. kolík modulu arduino je pripojený k ovládaču jednosmerného motora. Kondenzátor a dióda bežných komponentov sú tiež pripojené k modulu arduino pomocou napájania z batérie.

Arduino modul
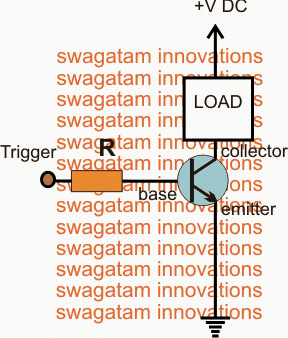
IC vodič motora
Na spustenie jednosmerného motora vodič vodiča IC použité. Kolíky 3,6 a 11, 14 budiča motora sú spojené s jednosmerným motorom. Vstupné kolíky 1 a 2 sú pripojené k modulu arduino a aktivačný kolík je pripojený k kolíku vysielača arduino. Kolíky 4, 5, 12, 13 vodiča motora sú spojené so zemou.

IC vodič motora
Ultrazvukový senzor
V tomto koncepte ultrazvukový senzor slúži na detekciu prekážky vpredu a vyšle povel na dosku arduino. V závislosti na vstupnom signáli mikrokontrolér presmeruje robota na pohyb v alternatívnych smeroch.

Ultrazvukový senzor
Aplikácie vyhýbania sa prekážkam robota arduino
- Robot arduino sa môže pohybovať na akomkoľvek povrchu
- Môže sa pohybovať na kovovom povrchu ako telo chladničky.
Na nasledujúcom obrázku je znázornený robot arduino na vyhýbanie sa prekážkam

Arduino robot na zabránenie prekážkam
Postaviť robota s mikrokontrolér 8051 vysvetľujeme robotické vozidlo na detekciu kovov. Komponenty potrebné na zostavenie robota s mikrokontrolérom 8051 sú
- Mikrokontrolér 8051
- Jednosmerné motory
- Vodiči motorových vozidiel
- Detektor kovov
- Dekodér
- Kódovač
- Tlačidlá
- Krištáľ
- RF vysielač a prijímač
Detektor kovov
The detektor kovov je cievka, ktorá má jednu alebo viac kovových cievok používaných na detekciu kovov na zemi. Detektor kovov pracuje na princípe elektromagnetickej indukcie. Detektor kovov je pripojený k telu robota cez PCB, čo môžeme pozorovať na poslednom obrázku. Nasledujúci obrázok zobrazuje všeobecný detektor kovov používaný v elektronických projektoch.

Detektor kovov
Tlačidlá
Tlačidlá sú tlačidlá, ktoré sú vyrobené z tvrdých kovov, ako je plast a kov. Spravidla sa tlačidlá používajú na resetovanie programu v mikrokontroléri. Nasledujúci obrázok zobrazuje obrázok tlačidla.

Tlačidlo
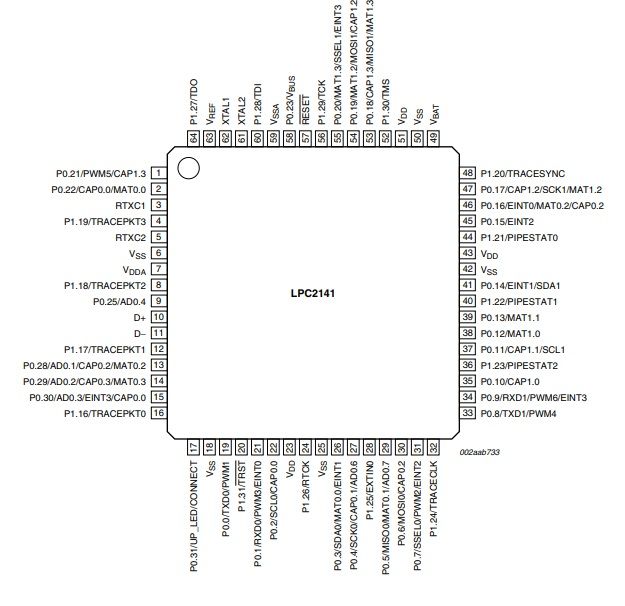
Mikrokontrolér 8051
The Mikrokontrolér 8051 sa skladá zo 40 pinov . 4. a 5. pin mikrokontroléra je pripojený k kryštálovému oscilátoru. Pin Vcc je napájaný z 5 V a uzemňovací pin je pripojený k zemi. Kolíky 15, 16, 18, 19 mikrokontroléra sú spojené s kódovacím obvodom IC HT12E. Kolíky 2, 7, 8, 9 mikrokontroléra sú spojené s tlačidlami.
Nasledujúci obrázok po pripojení všetkých komponentov, ako sú rezistor, kondenzátor, kryštálový oscilátor, mikrokontrolér série 8051, kódovacie zariadenia atď., Je zapnutý dosku plošných spojov .

Pripojenie PCB
Na nasledujúcom obrázku je robot s detektorom kovov s mikrokontrolérom série 8051.

Robot s detektorom kovov s mikrokontrolérom série 8051
V tomto článku sme diskutovali o Ako zostrojiť robota s mikrokontrolérom arduino a 8051 . Dúfam, že ste si prečítaním tohto článku získali základné vedomosti o stavbe robota. Ak máte akékoľvek otázky týkajúce sa tohto článku alebo ohľadom elektroniky a komunikačné projekty , neváhajte a komentujte v nasledujúcej časti. Tu je otázka pre vás, Čo je to mikrokontrolér série 8051?
.