Príspevok vysvetľuje jednoduchú prekážku, ktorá sa vyhýba obvodu robota bez mikrokontroléra a bez použitia špeciálnych obvodov alebo integrovaných obvodov vodiča motora. Túto myšlienku požadoval pán Faiyyaz
Dizajn
V zásade je to vo forme a idúce vozidlo ktorý je schopný detekovať a vyhnúť sa potenciálnym prekážkam na svojej ceste a vhodne zmeniť smer tak, aby jeho pohyb zostal neprerušovaný, jednoduchý!
Prevádzka je teda automatická bez manuálneho alebo ľudského zásahu.
Prezentovaná myšlienka vyhýbania sa prekážkam robotom bez mikrokontroléra, ako už názov napovedá, mikrokontrolér nepoužíva, a preto je jeho výroba mimoriadne jednoduchá a vhodná pre každého nového fanda.
Pri navrhovaní obvodu som si uvedomil, že na implementáciu princípu bude potrebných minimálne niekoľko modulov snímača prekážok, pretože použitie jedného modulu môže spôsobiť nepravidelný pohyb motora a nemusí pomôcť plynulému odklonu alebo otočeniu vozidla smerom k. voľná cesta.
Nastavenie motora vozidla je celkom podobné ako v prípade autíčko na diaľkové ovládanie o ktorých som hovoril v jednom z predchádzajúcich príspevkov.
Nasledujúca schéma predstavuje jeden z modulov systému, a preto by boli potrebné dva alebo pár takýchto modulov cez pravú a ľavú stranu vozidla.
Myšlienka je jednoduchá a funguje bez mikrokontroléra a bez špeciálnych integrovaných obvodov ovládača motora. To znamená, že to zvládnete bez akéhokoľvek kódovania a bez použitia akéhokoľvek zložitého integrovaného obvodu IC vodiča ..... a obvod vám umožní používať akýkoľvek jednosmerný motor bez ohľadu na jeho výkon, takže by sa dalo vyhnúť aj prekážkam s vysokým výkonom, ktoré sa vyhýbajú vozidlám. vyrobené pomocou tohto obvodu, ktoré sa bežne používajú v obchodných centrách a podobných maloobchodných predajniach.
Schéma zapojenia

Teraz sa pokúsime porozumieť vyššie uvedenému okruhu pomocou nasledujúceho vysvetlenia:
Ako to funguje
IC 555 je nakonfigurovaný ako IR vysielač a je nastavený na generovanie konštantnej frekvencie 38 kHz, zatiaľ čo susedný tranzistorový obvod je konfigurovaný ako stupeň prijímača alebo stupeň IR snímača.
Predpokladajme, že je to modul na pravej strane, a predpokladajme, že tento modul zistí ako prvý prekážku v ceste.
Preto hneď ako je zistená prekážka, 38kHz frekvencia generovaná 555 IC sa odrazí smerom k senzoru susedného prijímacieho obvodu.
Prijímač okamžite aktivuje príslušné tranzistory tak, že je bránený vedeniu konečného budiaceho tranzistora.
Teraz sa má motor, ktorý je riadený týmto tranzistorom, nachádzať na ľavej strane vozidla, to znamená na opačnej strane tohto modulu ... podobne motor na pravej strane je v skutočnosti riadený modulom na ľavej strane .
V dôsledku toho, keď sa aktivuje vyššie uvedený predpokladaný modul detekcie prekážok na pravej strane, zastaví motor na ľavej strane, zatiaľ čo motor na pravej strane sa môže normálne pohybovať.
Táto situácia vedie k tomu, že vozidlo je nútené odbočiť na ľavú stranu ... čo znamená, že teraz predpokladaný ľavý modul začne dostávať ešte silnejšie signály prekážok a neustále núti vozidlo, aby pri prebiehajúcom odbočovaní pokračovalo tvrdšie, kým sa prekážke úplne nevyhne. . Modul teraz prestáva prijímať signály o prekážkach a vozidlo sa začne normálne pohybovať dopredu po svojej novej dráhe.
Počas vykonávania vyššie uvedeného odklonu je modul na ľavej strane nútený čoraz viac izolovať a vzdialiť sa od prekážky, aby nedostal príležitosť zasahovať do postupu a umožniť čisté a plynulé odklonenie vozidla.
Presne rovnaké postupy sú implementované v prípade, že modul na ľavej strane náhodou zacíti prekážku pred modulom na pravej strane, pričom vozidlo je nútené čoraz silnejšie sa pohybovať smerom k pravej strane.
Vidíme tiež „deaktivujúci“ stupeň obvodu v module, ktoré sú navzájom prepojené cez ľavý a pravý bočný modul. Táto fáza je zámerne zavedená s cieľom zabezpečiť, aby sa oba moduly nikdy neaktivovali spoločne.
Preto napríklad ak napríklad modul na ľavej strane začne detekovať prekážku ako prvý, okamžite deaktivuje modul na pravej strane a iniciuje odklon vozidla vpravo a naopak.
IC senzora môže byť štandardná séria TSOP17XX
Ďalšie informácie o vyššie uvedenom IC senzora sa môžete dozvedieť ako pripojiť TSOP1738 IC
A motor by mal byť vybavený prevodovkami, aby sa pohyb pôvodne udržiaval na riadenej úrovni.
Nastavené koleso
Kompletné nastavenie ľavého a pravého modulu a príslušné elektrické zapojenia možno vidieť na obrázku nižšie:

Aktualizácia
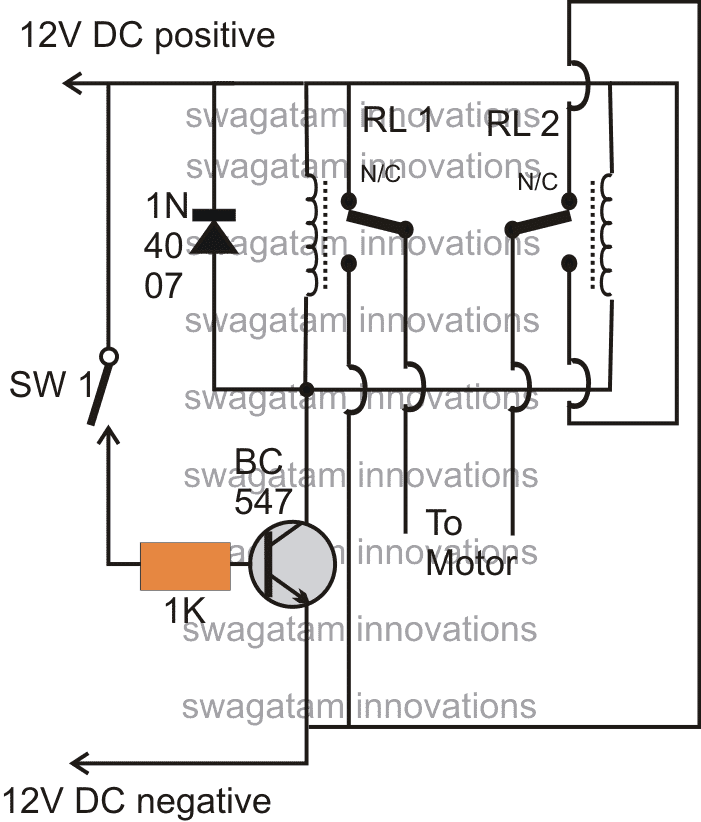
Trochu myslenia nám hovorí, že vyššie uvedenú jednoduchú prekážku, ktorá sa vyhýba obvodu robota, je možné implementovať aj použitím jedného modulu namiesto dvoch.
Jediný modul by však umožnil vozidlu vykonať jednostranné odklonenie zakaždým, keď zistí prekážku, a preto by bolo možné systém nakonfigurovať tak, aby sa odklonil v smere hodinových ručičiek alebo proti smeru hodinových ručičiek, v závislosti od toho, ktorý motor je pre dané činnosti spojený s obvodom.
Príklad nastavenia je možné vizualizovať na nasledujúcom obrázku:

Zdá sa však, že s nastaveným jedným motorom je jeden problém. Ak sa predpokladá, že sa vozidlo stretne s pravouhlým rohom na ľavej strane. Toto prinúti vozidlo, aby sa stále pohybovalo proti smeru hodinových ručičiek, až kým neotočí obrat proti smeru hodinových ručičiek, a začne sa pohybovať naspäť v rovnakom smere, odkiaľ začalo. Toto by užívateľ neocenil.
Predchádzajúci: Rezistory SMD - úvod a práca Ďalej: Ako funguje akcelerometer